Fully Autonomous Vehicle Based on AVIS engine
Overview
These tracks included urban and race environments. Each one had its own set of rules and difficulties.
-
2nd rank in the Race section
3rd rank in the Urban Section
Best technical report
-
Object Detection
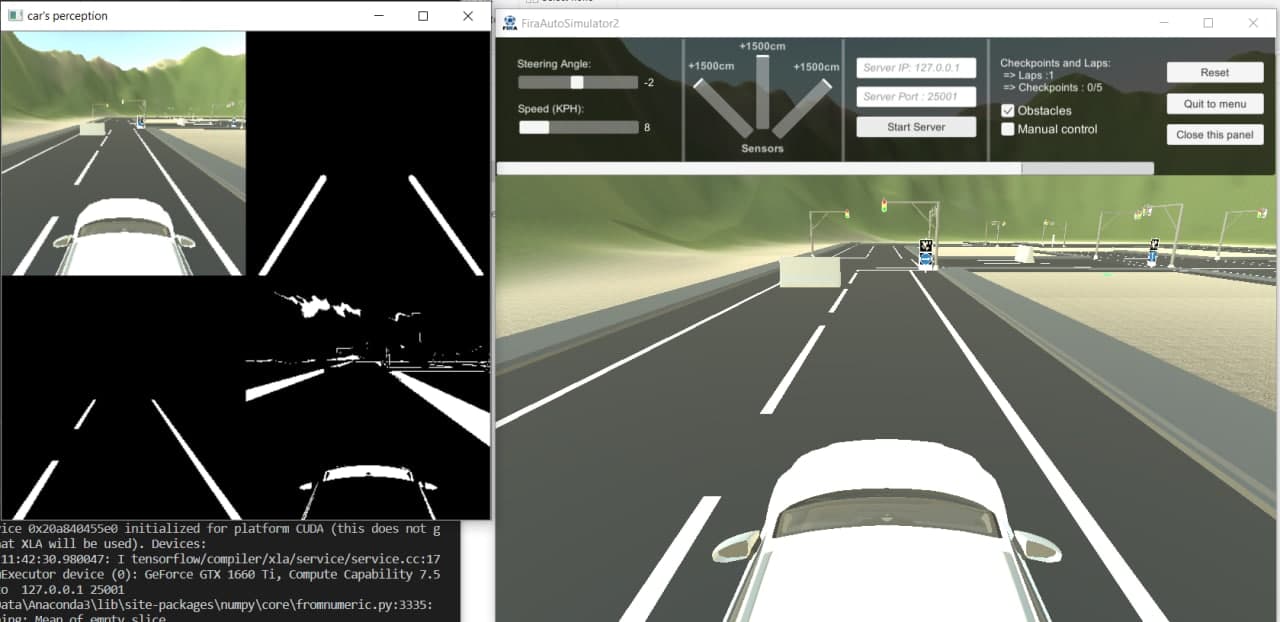
Segmentation
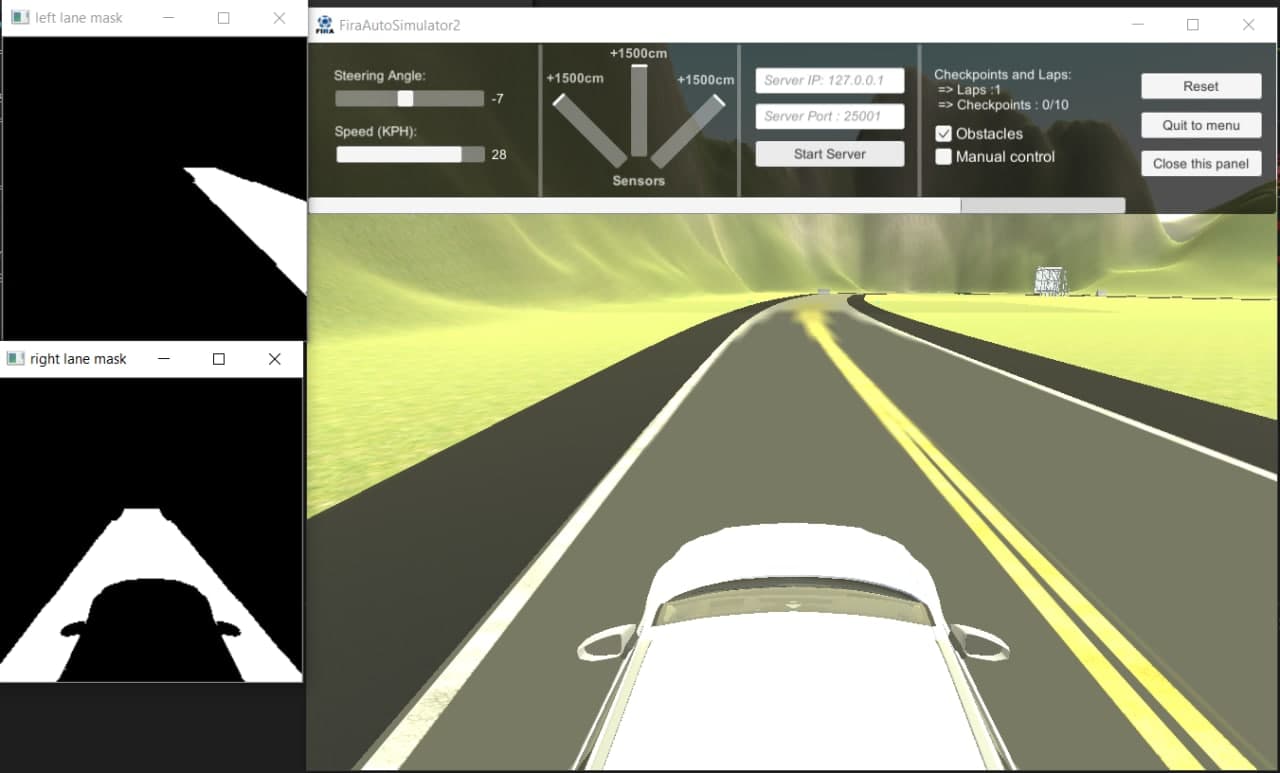
Line Detection
Traffic Sign Detection
PID Controller for Speed and Steering Motion Planning
Some pictures of the project are as follows: