Environment Perception and Parallel Parking for an Autonomous Vehicle
Overview
-
1. Fulfill the task of environment perception for a self-driving car (GitHub Link)
2. Automatic Parking as well as designing an environment to do it (GitHub Link)
-
Our team managed to get the first rank among more than 15 qualified teams in the competition.
-
Object Detection
Segmentation
Line Detection
Traffic Sign Detection
Monocular Depth Estimation
-
Path Planning
Path Tracking
Environment Design
Traffic Sign Detection
Some pictures of the Environment Perception task are as follows:
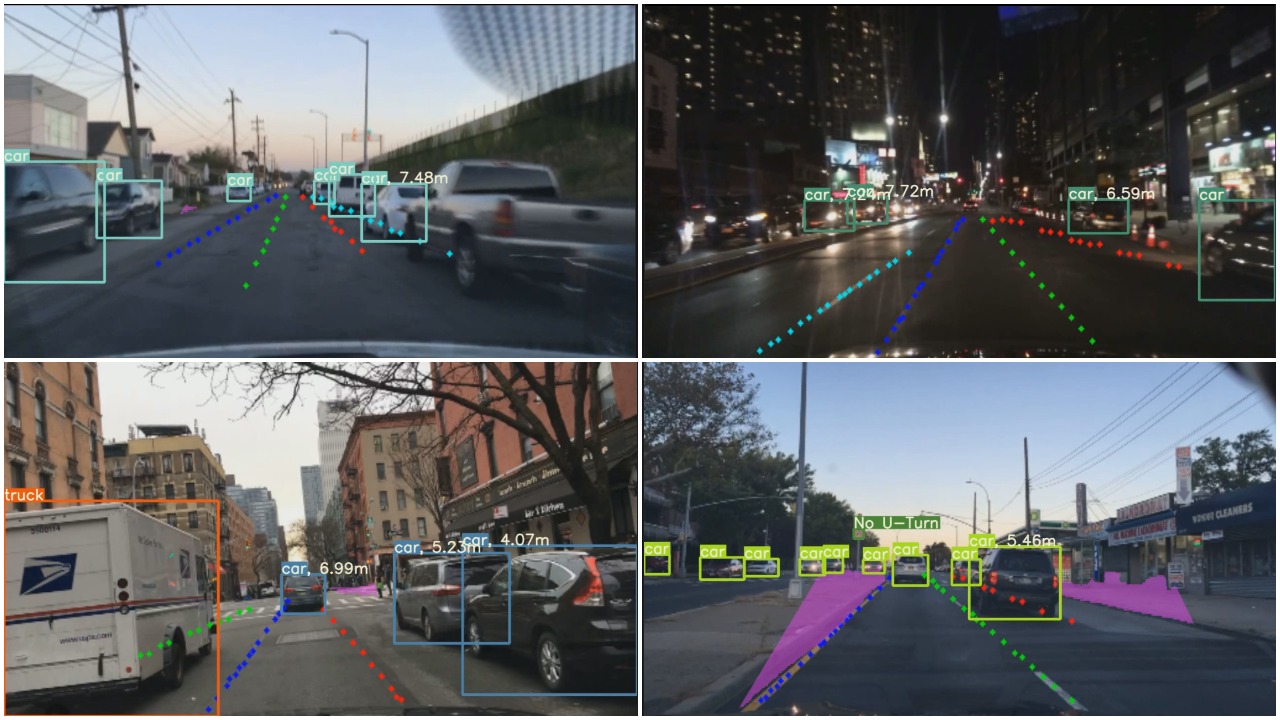
Some pictures of the Environment Perception task are as follows: