Design, Simulation, And Construction of An Autonomous Vehicle with Environment Perception, Planning, and Control Capabilities (Bachelor’s thesis)
Overview
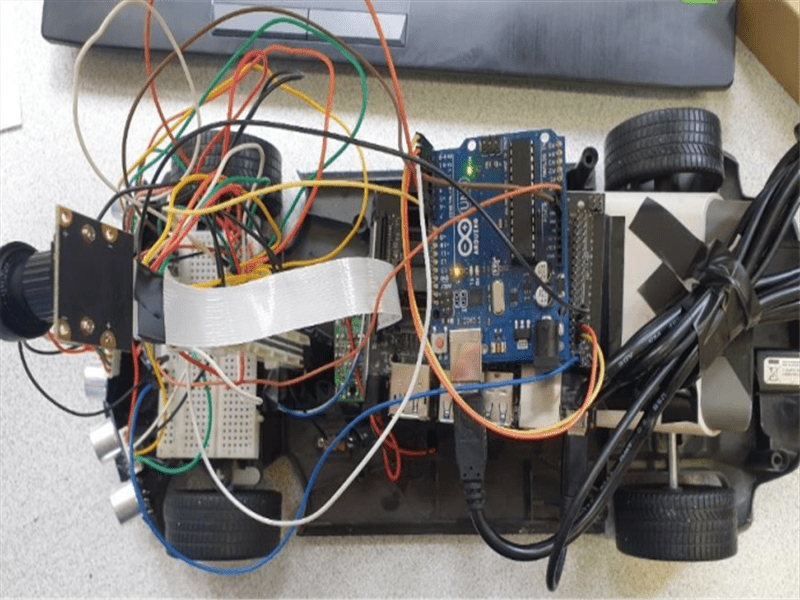
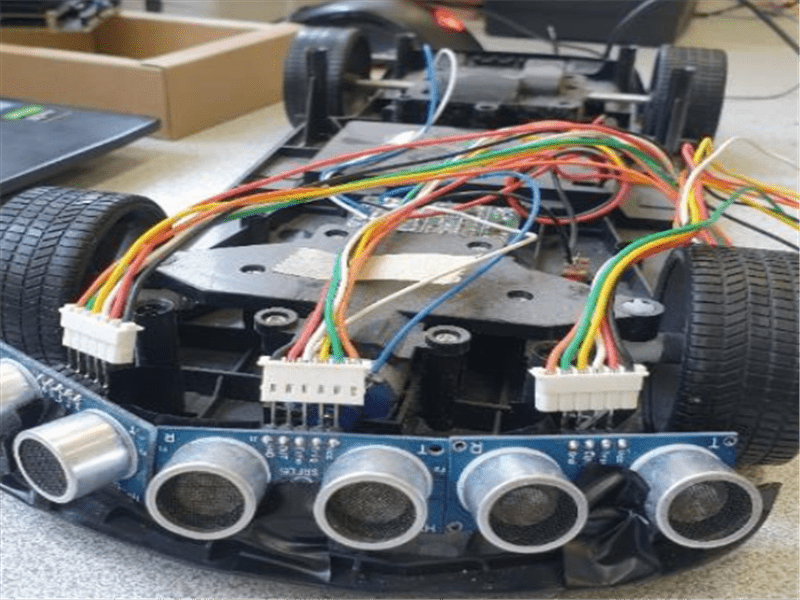
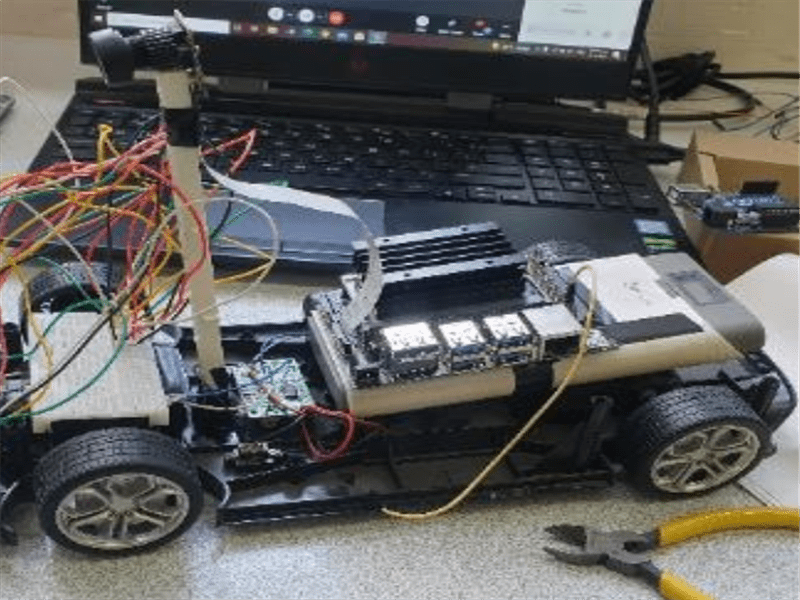
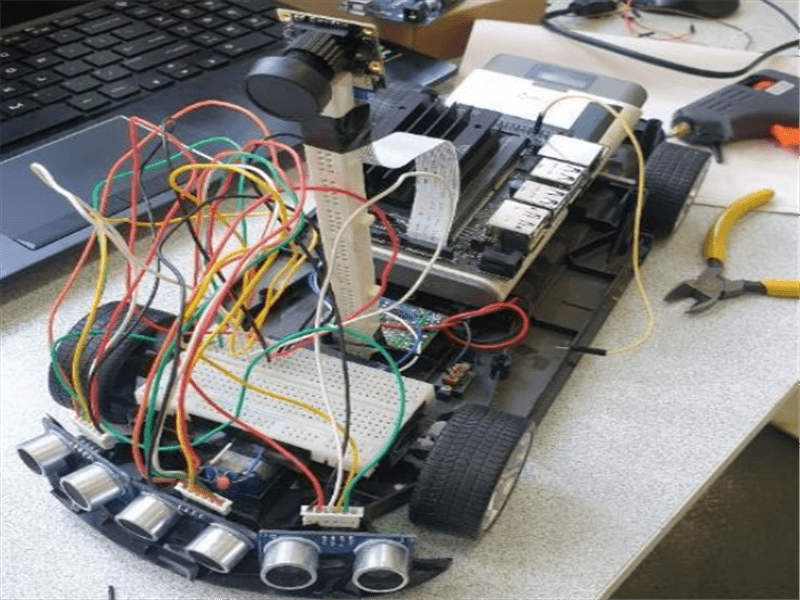
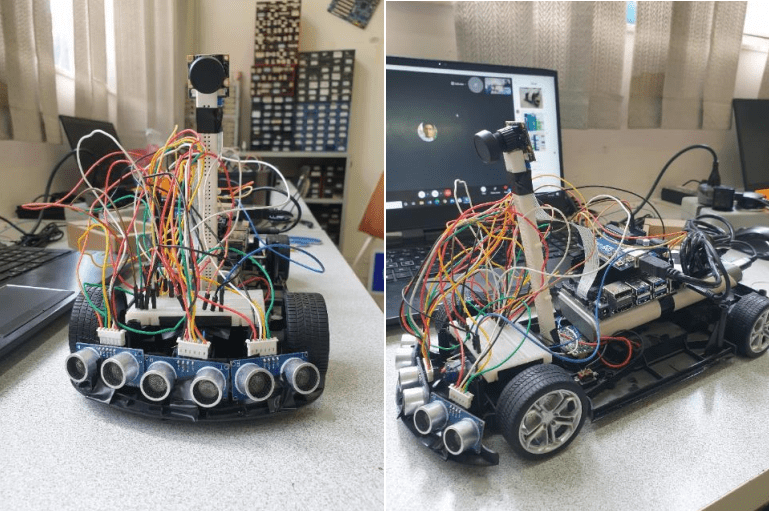
This project included building an autonomous toy car from scratch. We stripped an RC car of everything!
We used a Jetson Nano as the brains of the car. Furthermore, to avoid the risk of running undesired currents
through the Jetson board, we used an Arduino Uno as a tech shield =) This was a group project, and our team
consisted of 5 students: Milad Soltany, Amirhossein Kazerouni, Amirhossein Heidarian, Abbas Omidi, and Aida
Mohammadshahi.The complete report is available here. (Sorry, the report is in Farsi, hope you at least enjoy the pictures.)
As stated earlier, this was our Bachelor’s Thesis. We managed to get a full mark on our project (20/20).
Images of the car
Main Tasks
The car was supposed to do complete three different tasks:
- Completing an Urban Track
- Completing a Race Track
- Parallel Parking
Urban
The Urban Track looked something like this:
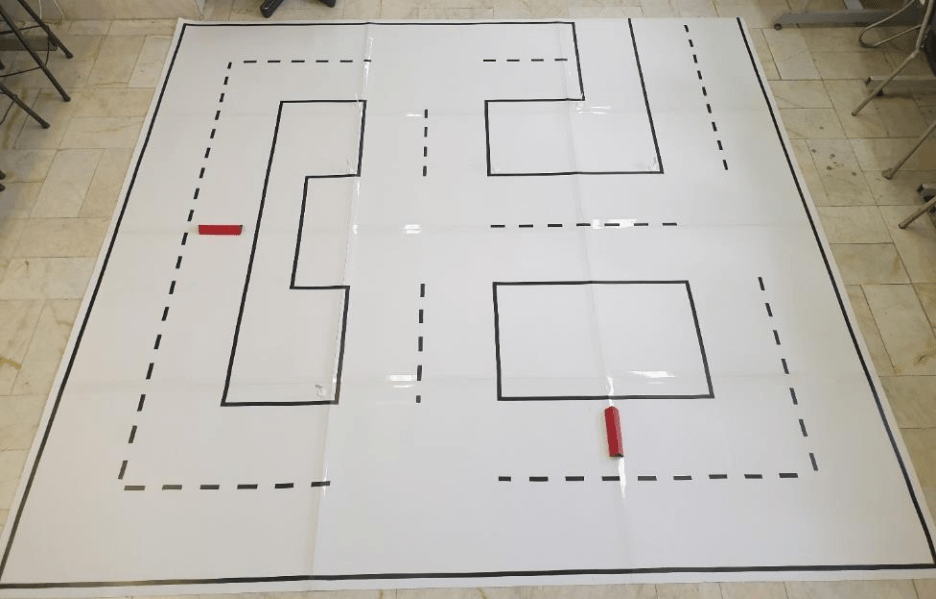
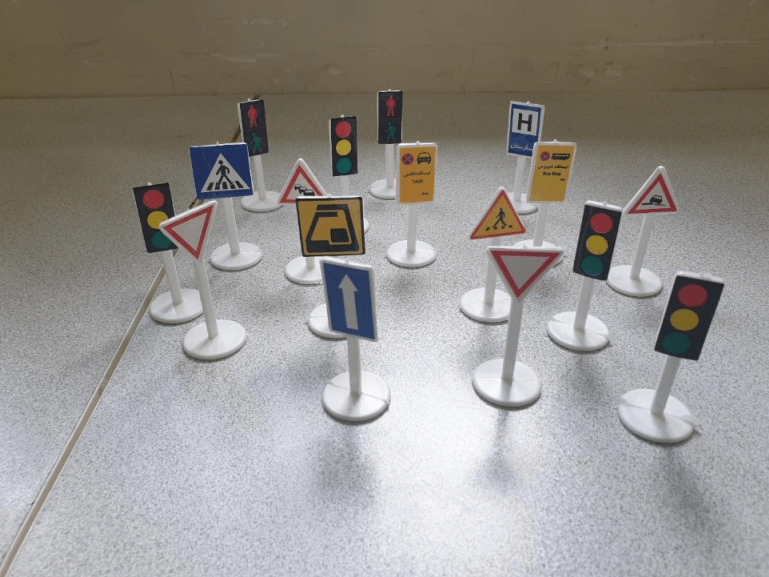
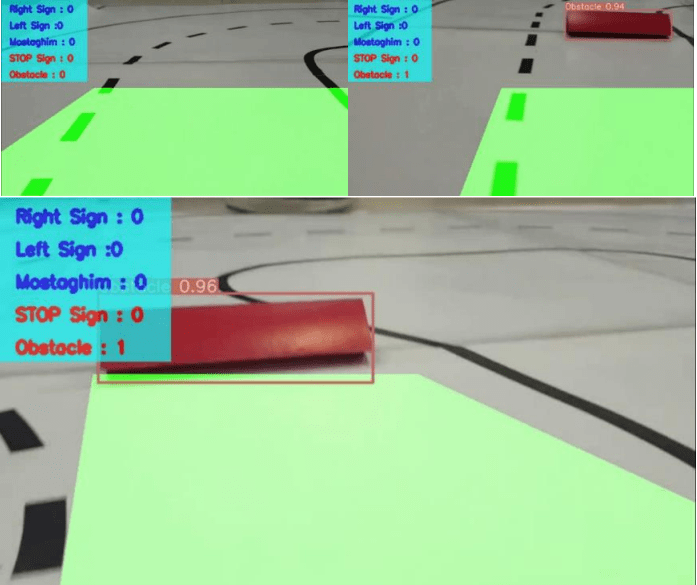
The car was supposed to complete the track and avoid the obstacles on the road. Moreover, it would have to abide by the rules that
the traffic signs introduced. These signs and signposts looked something like this:
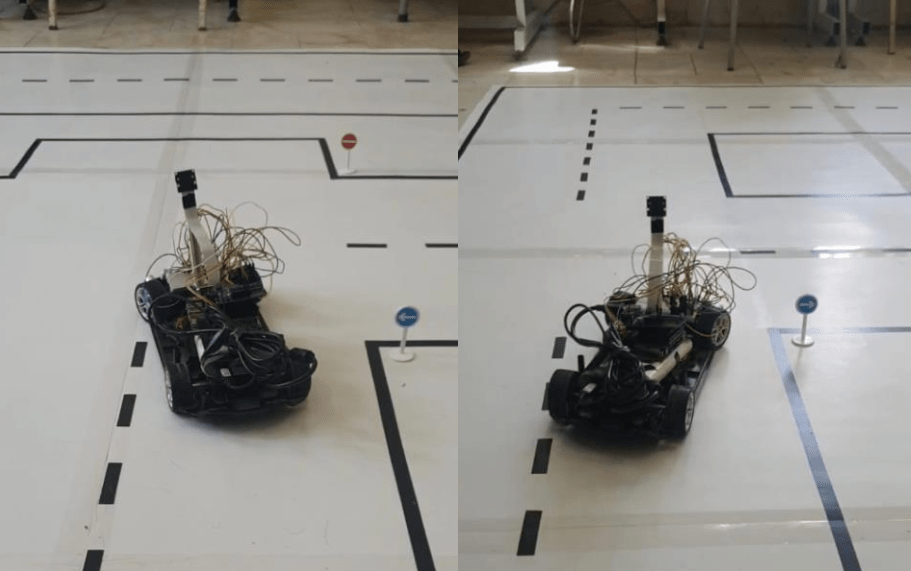
Some pictures of how the car would react to signs:
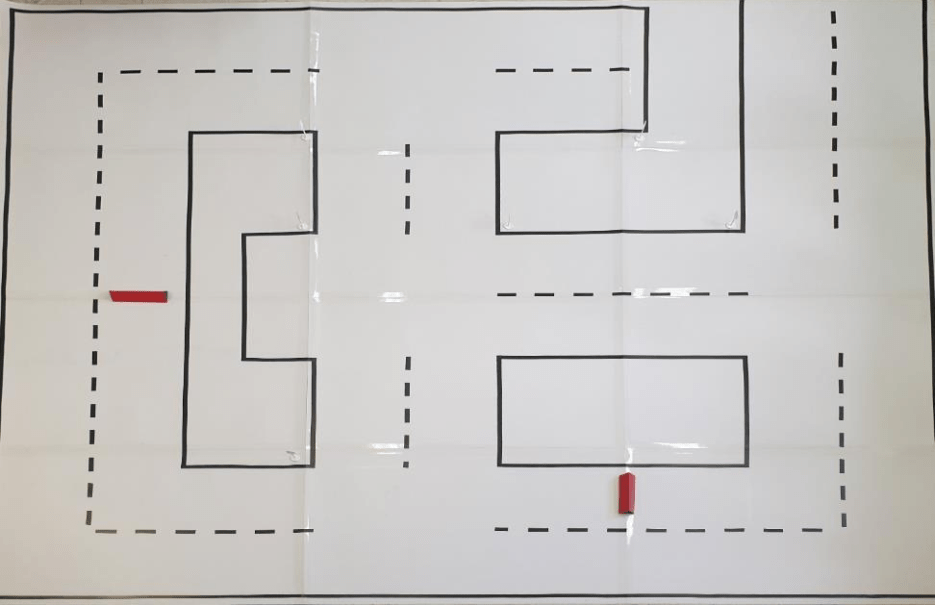
Race
This is how the Race Track looked:
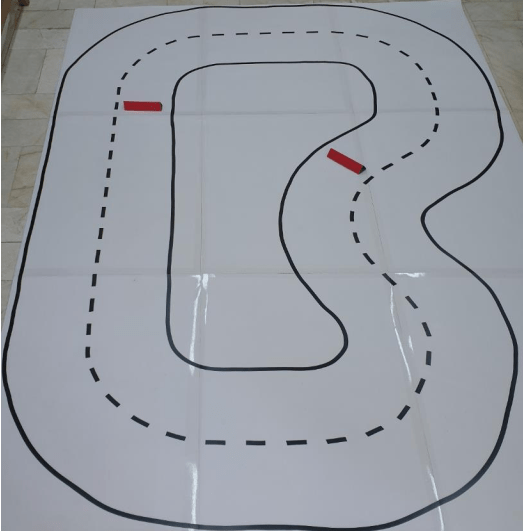
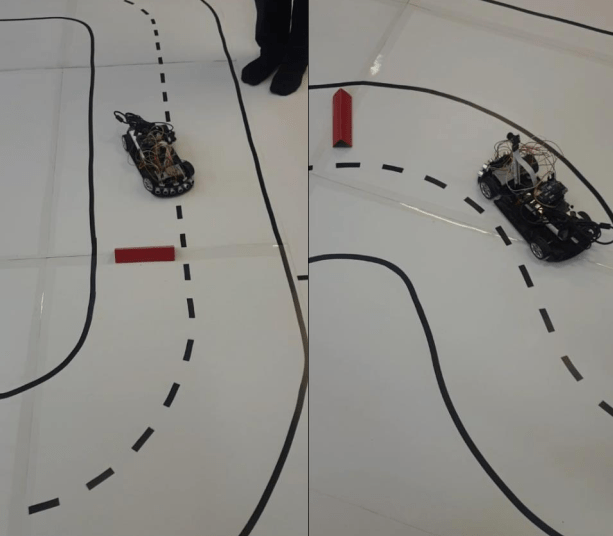
The goal was for the car to finish the lap as fast as possible and avoid the red obstacles on the road. And it did so quite well:
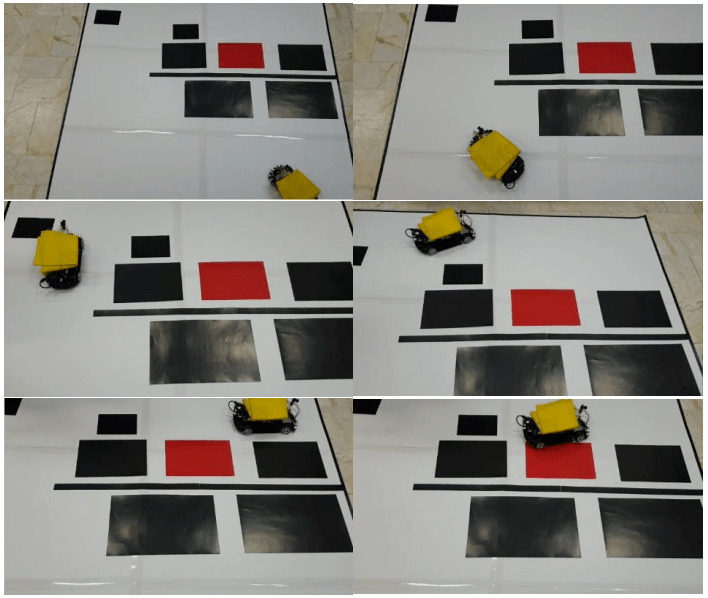
Parallel Parking
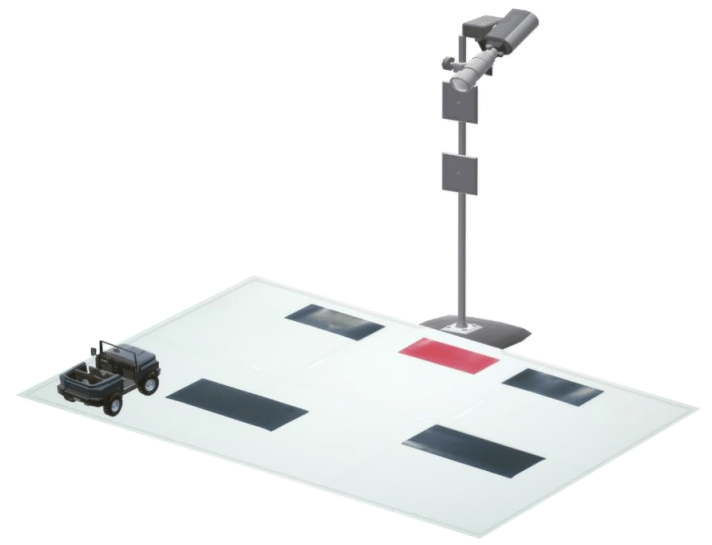
This is one of the exciting ones. There's a camera fixed above ground that sees the car and an empty parking space. The car is supposed to park in the red spot.
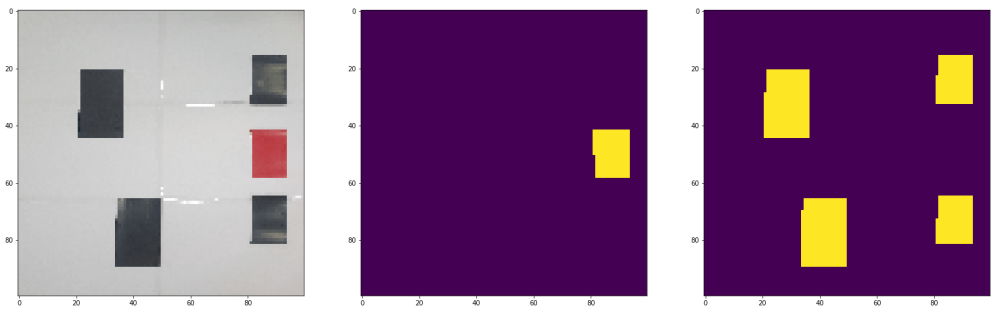
First, the empty spot and the occupied spots that the car cannot cross are detected
The car's trajectory is calculated then simulated. Afterward, the mapped trajectory is transmitted to the car.
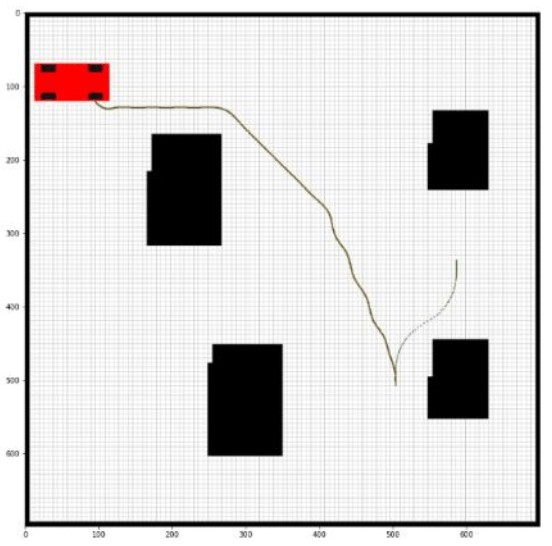
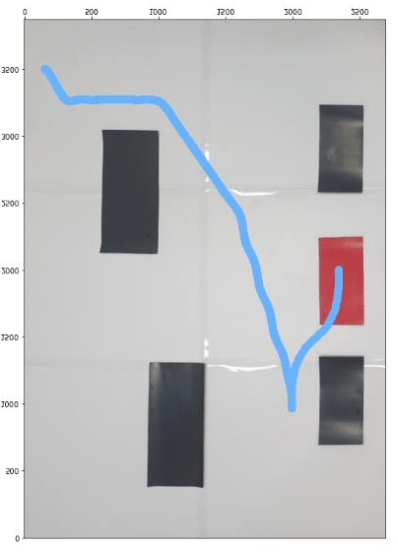
The car will then follow the predefiend trajectory and arrives at destination.